Shaan's Portfolio

Index

SUPERHERO MANIA
I love superheroes, especially Ironman. Over the past few years I have made several projects related to superheroes. Some of them are targeted towards teens while others are towards adults. The picture above is a 3D model of Ironman and War Machine built in my own style that will be sent to be 3D printed as a toy prototype.
Below are the other superhero related projects I have done.

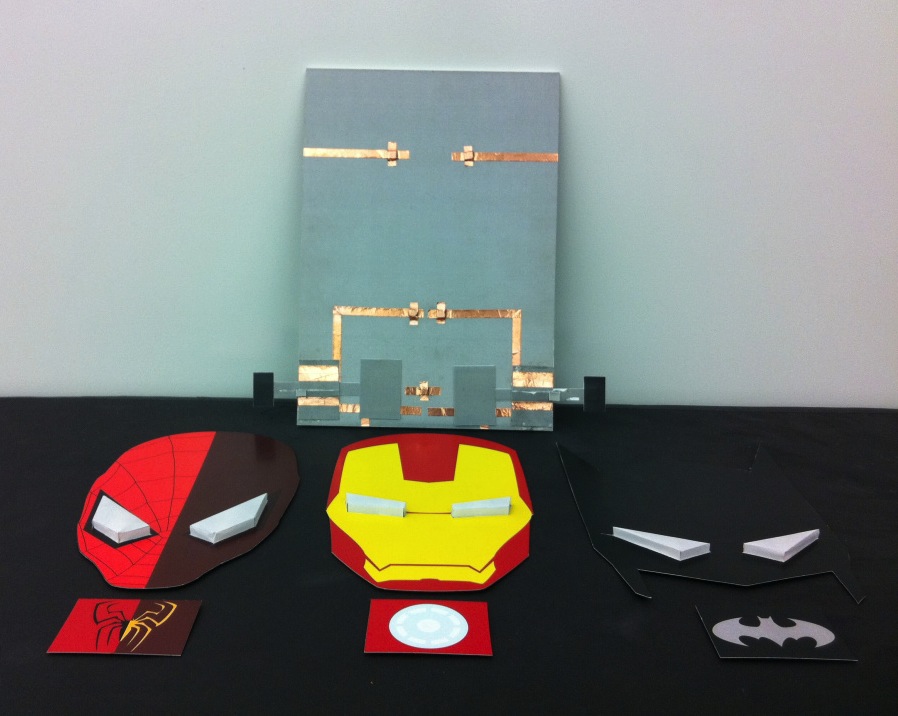
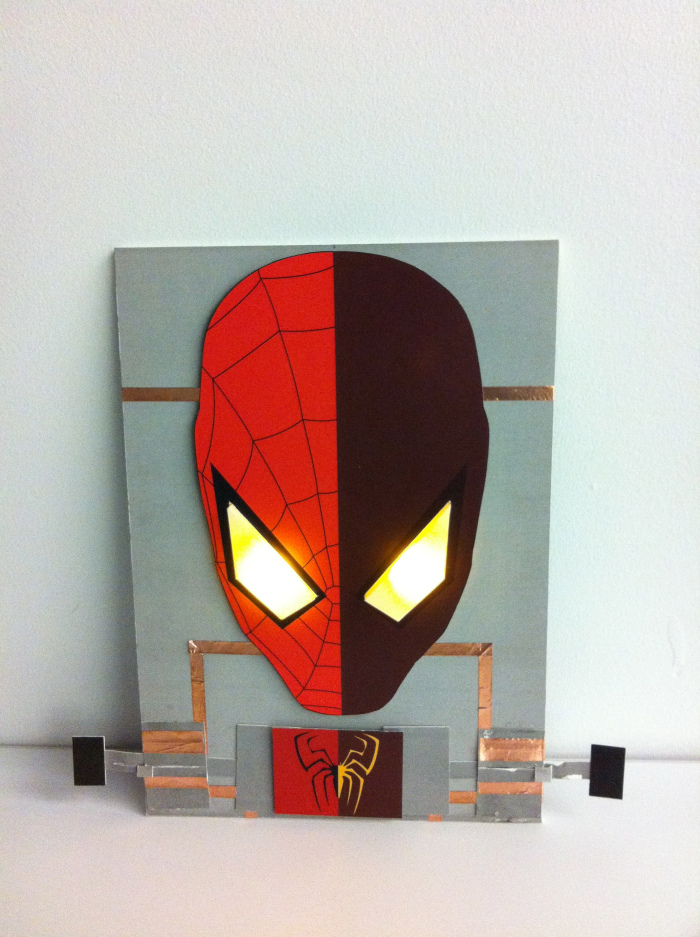
Superhero Lamp
'Superhero Lamp' is a paper lamp built using copper tape, magnets and LED's. The lamp comes with three superhero masks that can be placed on the the base. The base has sliders to control the brightness of the LED's in each eye. Each superhero has different colored eyes. Watch the video above to see the lamp being used.



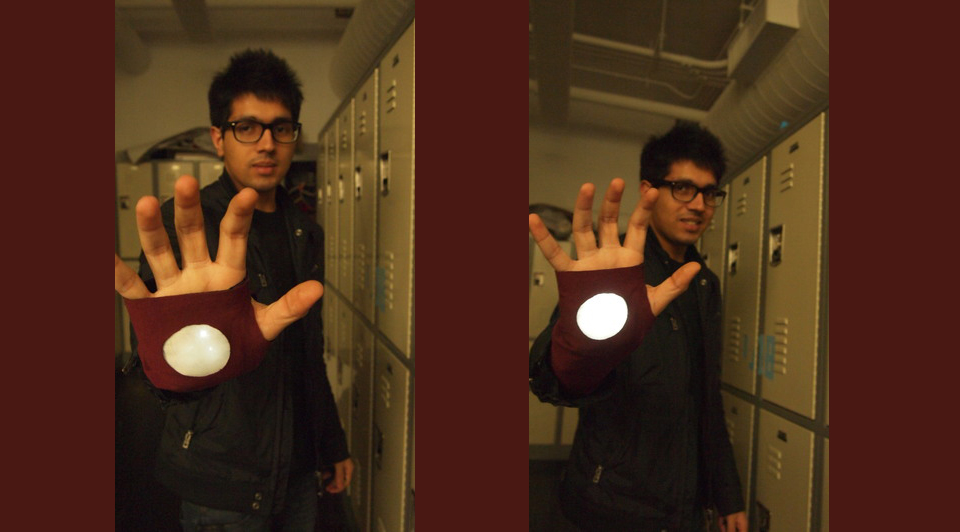


Everyday Superhero Glove
- Done in collaboration with Maxine Kim
Let us be honest. Everyone wants to be a superhero. The closest we can come to being a superhero is by wearing the costumes. However, they are too uncomfortable to wear everyday. We wanted to create comfortable to wear superhero gloves with little technological quirks that can be worn everyday.
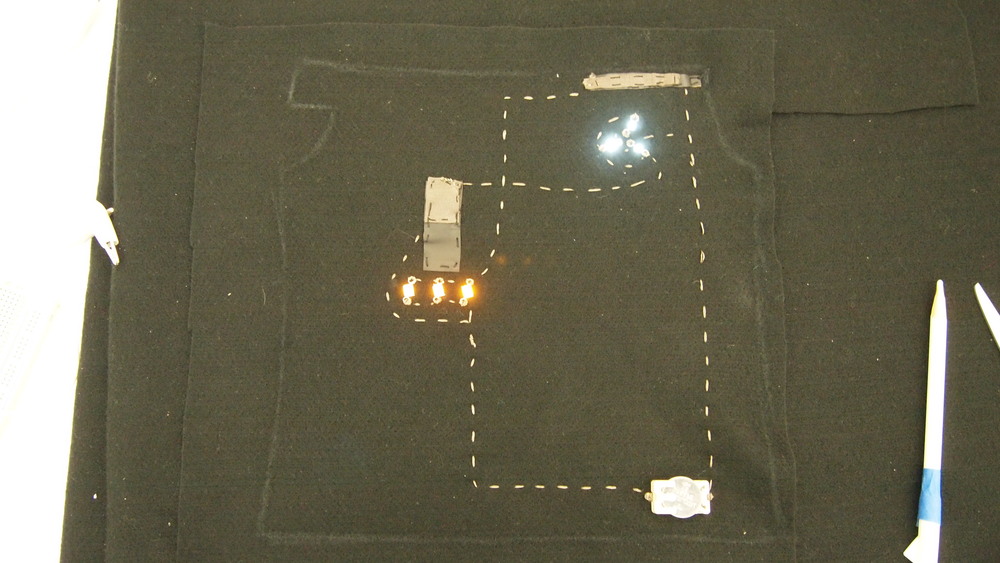
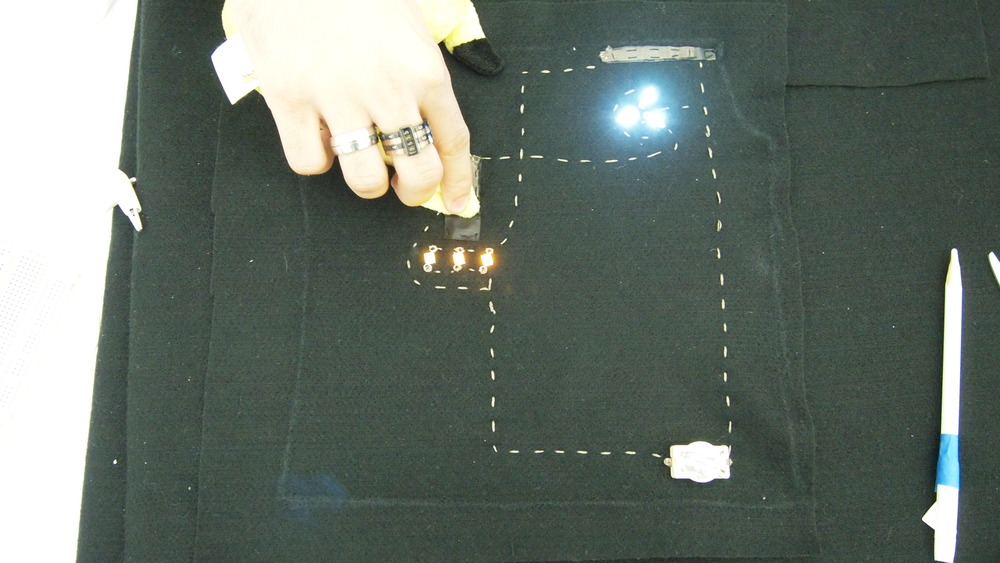
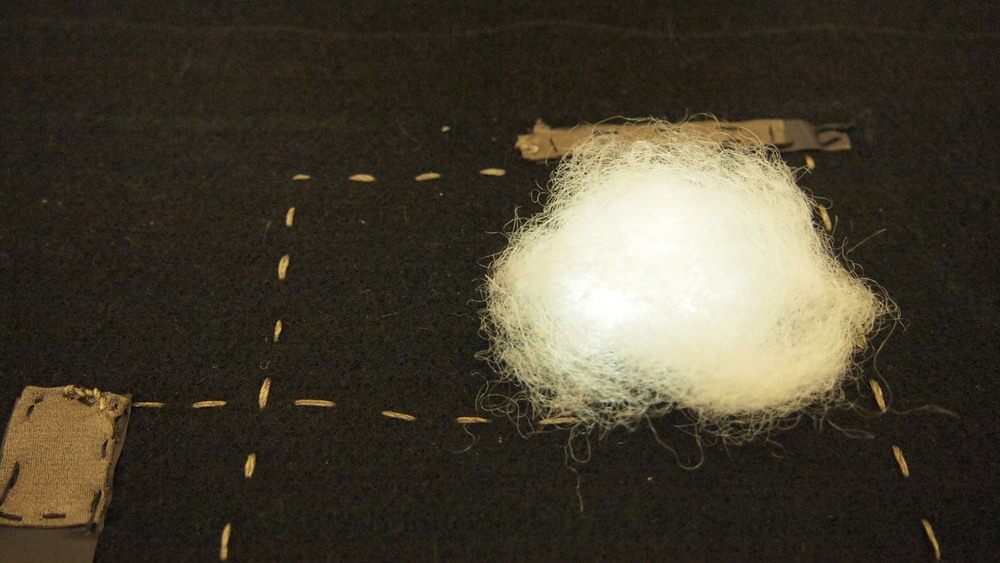
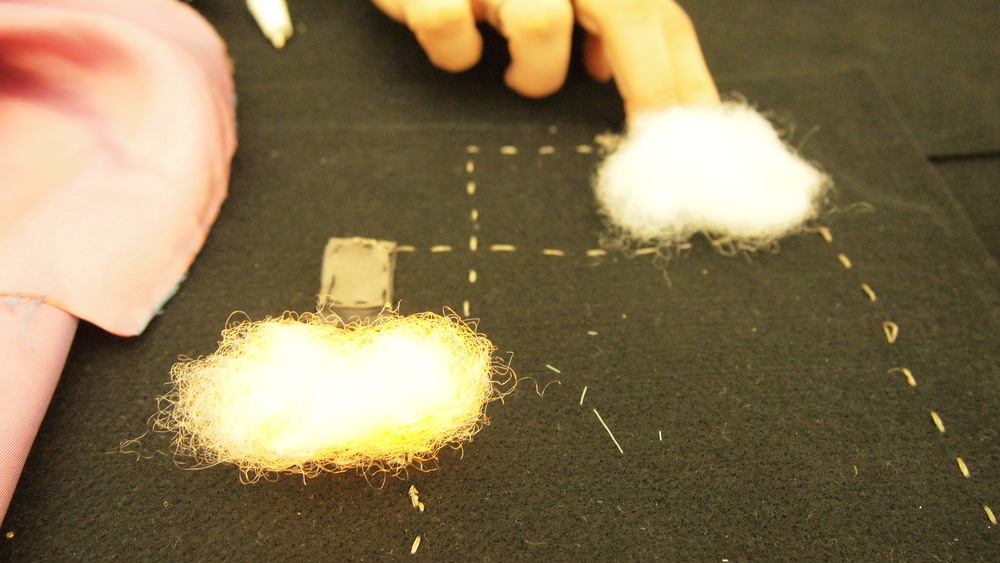
For this iteration we focused on Iron Man. The circuit was built onto felt before we used interfacing to attach the maroon fabric on top. We used velostat to create pressure sensors. Tilting your wrist back makes the light on your palm brighter. Squeezing your fist makes a yellow line light up on your wrist. This last bit was added to make a reference to the iron man suits in the new upcoming movie where golden is more prominent than red. Check out the video below to see it in action.


Iron Man Arm Repulsor
As you might have clearly noticed by now, Iron Man is by far the superhero I love most. Using paper, a blinkm LED, sensors and Arduino, I recreated his arm repulsor. A tilt sensor is hidden under the paper construction near the wrist. When you tilt your wrist back to shoot, the default yellow light fades to a turquoise blue. Watch the video above to see it in action.





JARVIS
In this project, Arduino is connected to a Processing sketch. The sketch shows the inside of Iron Man's helmet, his HUD (heads up display). A sonar sensor on a servo detects whether enemies are close by and depending on the distance the sketch acts differently. Check out to video to see it working.
(Images for the processing sketch were used from this Iron Man HUD tutorial)
I also used the sonar sensor to map out the room while it was placed on the servo. The images below represent that. The length of the line is defined by the distance and the placement on the X-axis is defined by the angle of the servo.


